

This project was completed at the Technische Universität Berlin as part of a research through the Control Systems Group.
The goal of this project was to design and construct a device to aid in rehabilitation of stroke patients, who struggle with knee flexion. Often losing joint flexion control in one or both legs, such patient have difficulty passing the leg forward during the gait cycle. This results in patient "hiking" their hip or swinging their leg around in order to pass the leg through, increasing metabolic costs and difficulty walking. Proper and effective rehabilitation plays a large role in returning patients to a natural gait cycle. Thus this device was designed to aid in the rehabilitative process and "retrain" the muscles in the leg and motor-neural pathways to the brain.
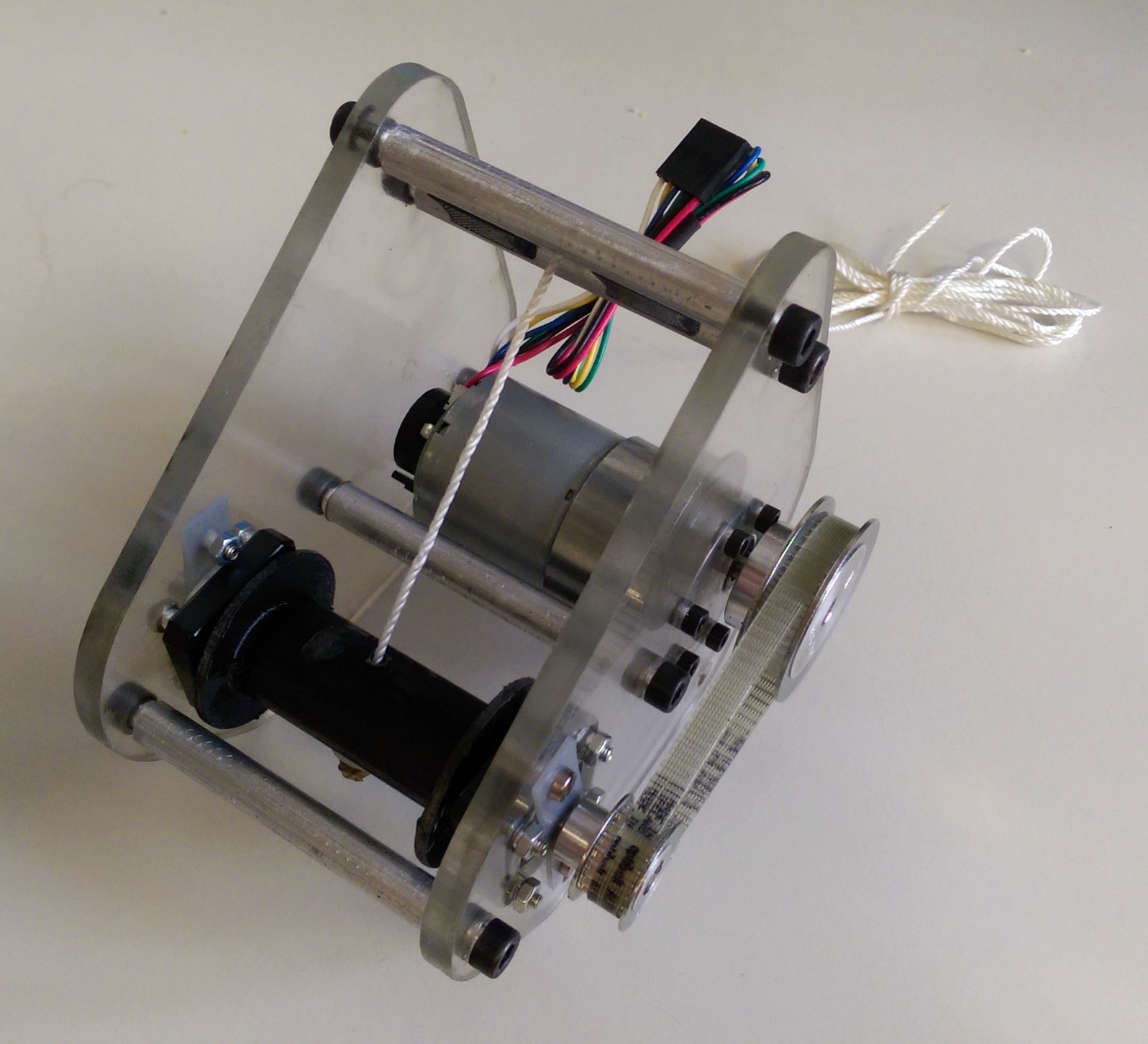
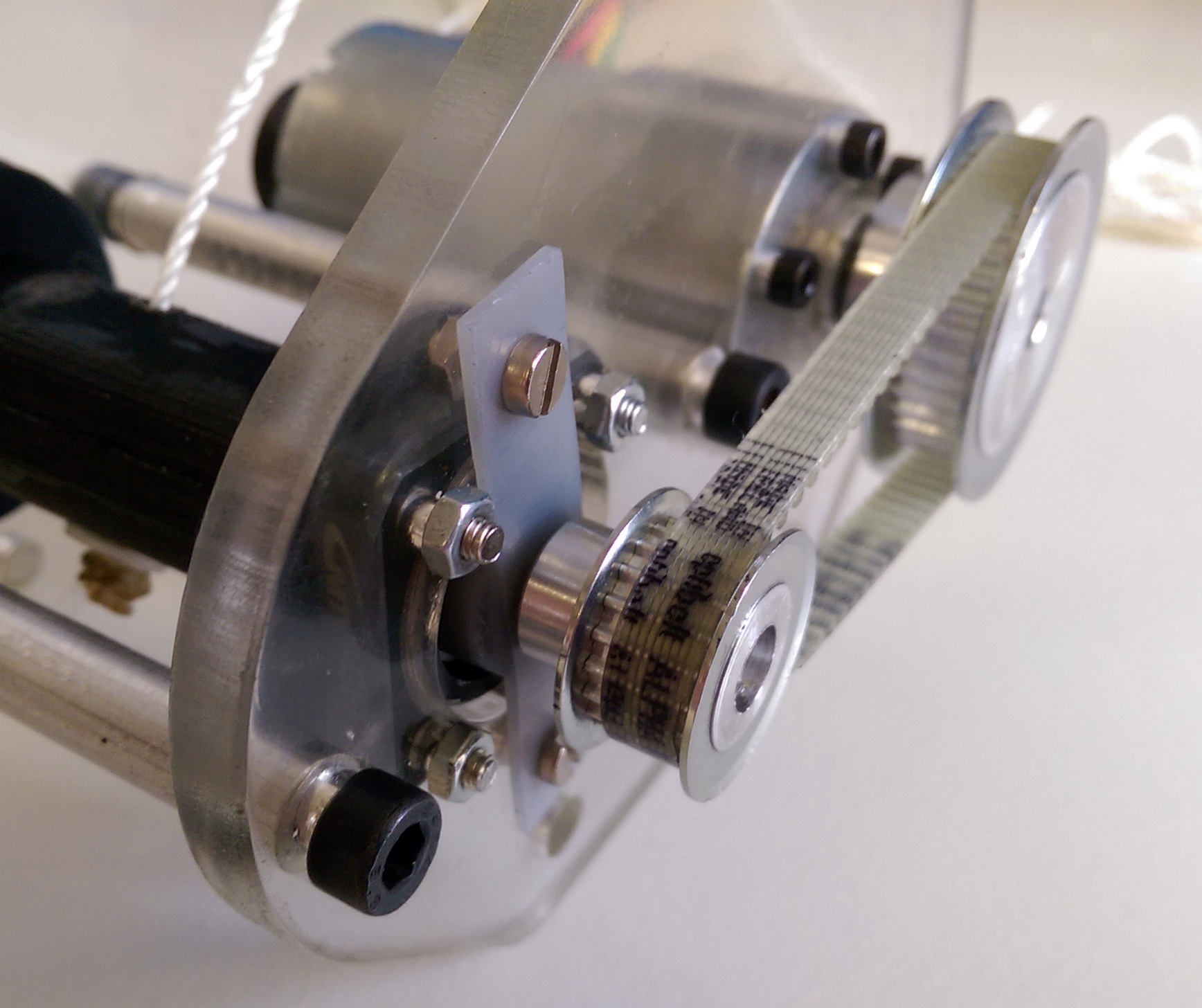
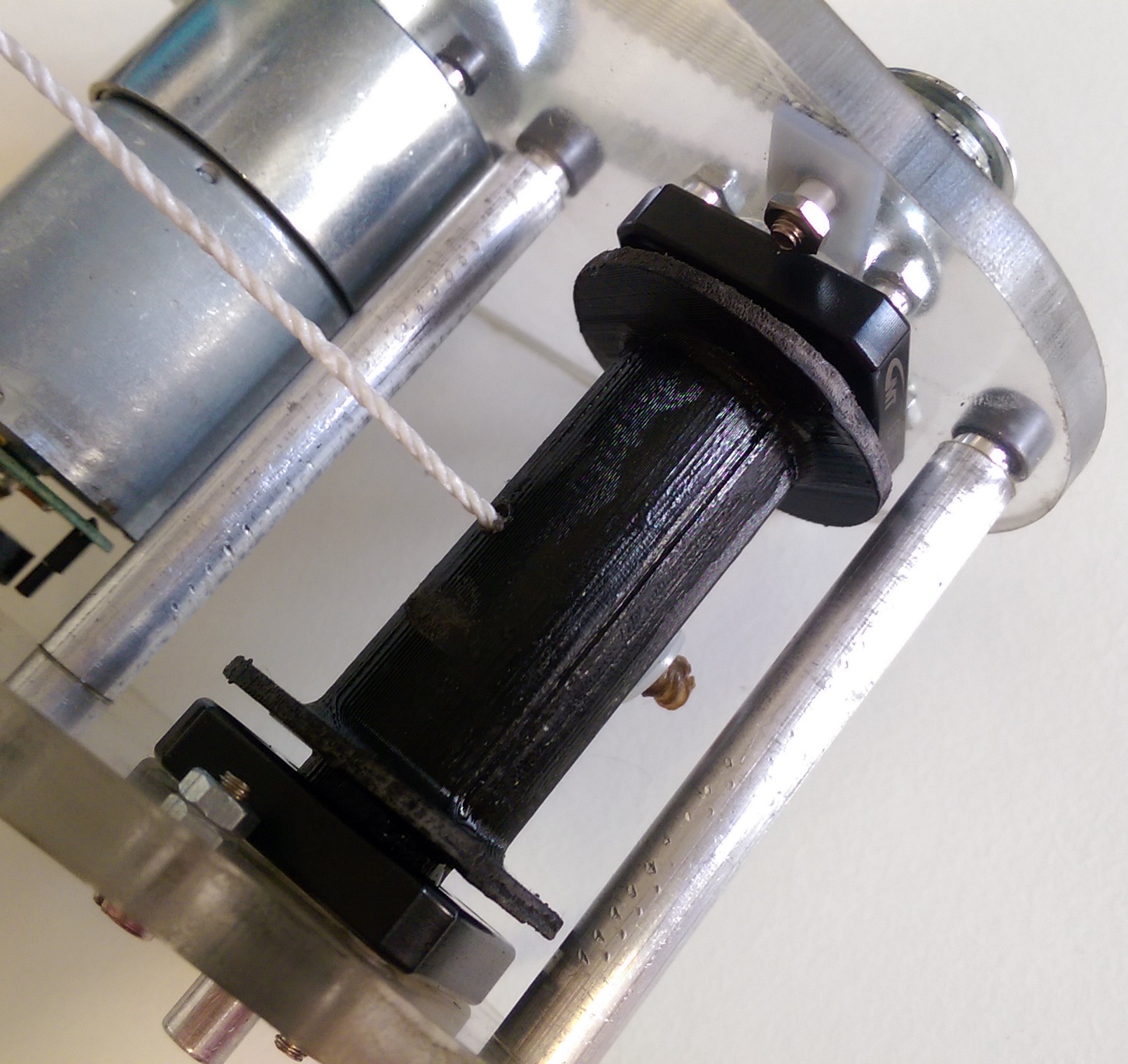
The device consists of a simple DC motor with encoder, micro-controller, pulley belt drive system, spindle, and string with ankle attachment. Using inertial measurement units (IMUs) on the leg, the exact phase of the gait cycle is known and the device pulls the ankle up (and in doing so, flexes the knee joint) at the right time to help pass the leg through and initiate the next step. Thanks to its basic pulley system design, the device is easily adaptable to a large variety of patients. Furthermore, by changing the force, speed, and point in the gait cycle, at which the ankle is pulled up, doctors can customize the rehabilitation program for the patients particular gait (and adjust the degree of assist as the patient improves).
Further application of this device lies in model building for future assitive exoskeletons. By varying the attachment point, force, and speed at which the device pulls, one can determine optimal design parameters for much more extensive devices.