

This project was completed at the Technische Universität Berlin as part of a research through the Control Systems Group.
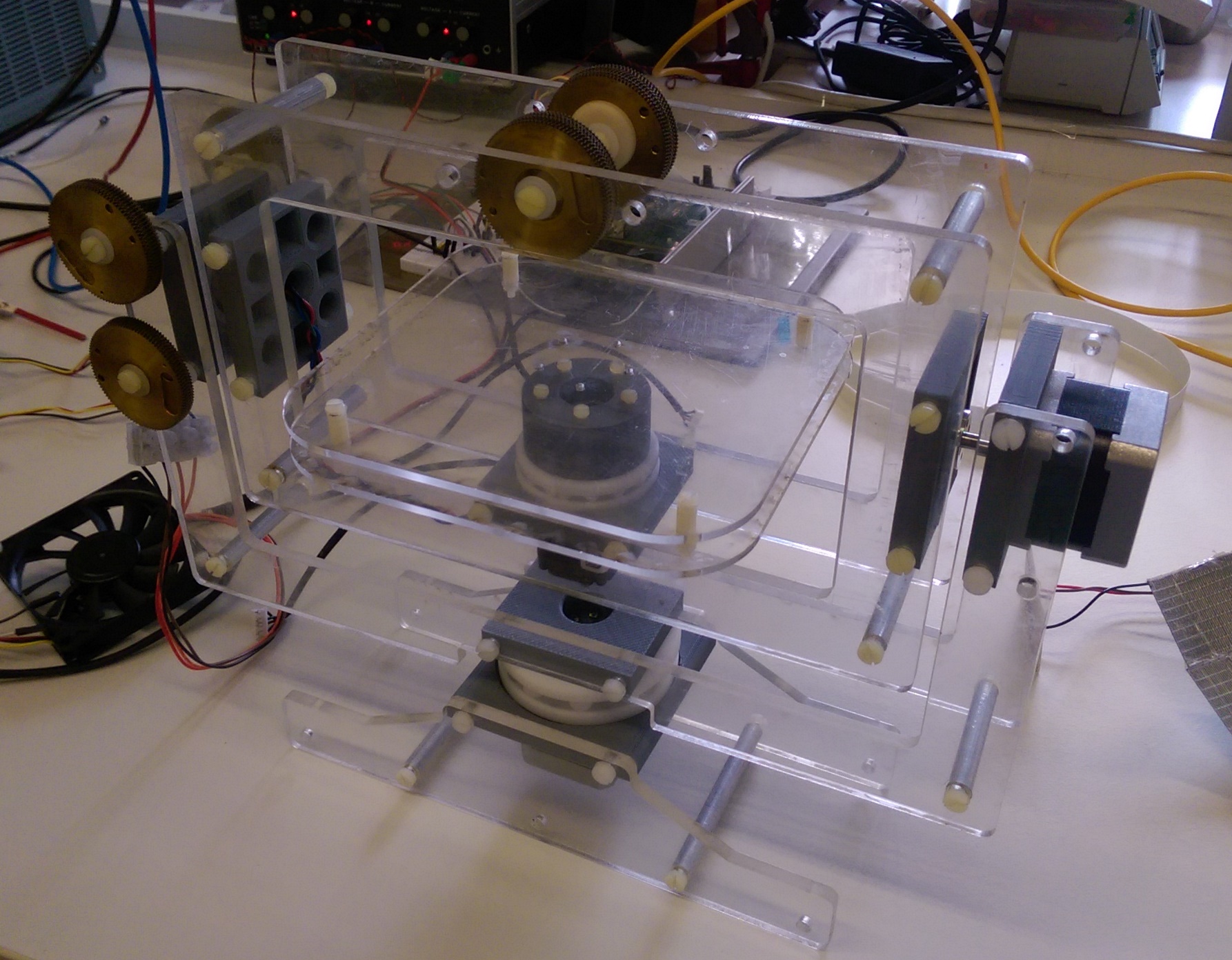
Fig. 1
The goal was to design and build a device to calibrate Inertial Measurement Units (IMUs) for use in assistive exoskeletons. IMUs are comprised of three different spacial measurement sensors: an accelerometer, a gyroscope, and a magnetometer. Using data from all three sensors, one can determine its exact 3D orientation in space. In this particular case, IMUs were being used at each finger segment in order to determine the 3D position of a stroke patient's hand. Using this data, one can then construct a computer generated model and subsequently tell the exoskeleton how to move the hand into its desired position.
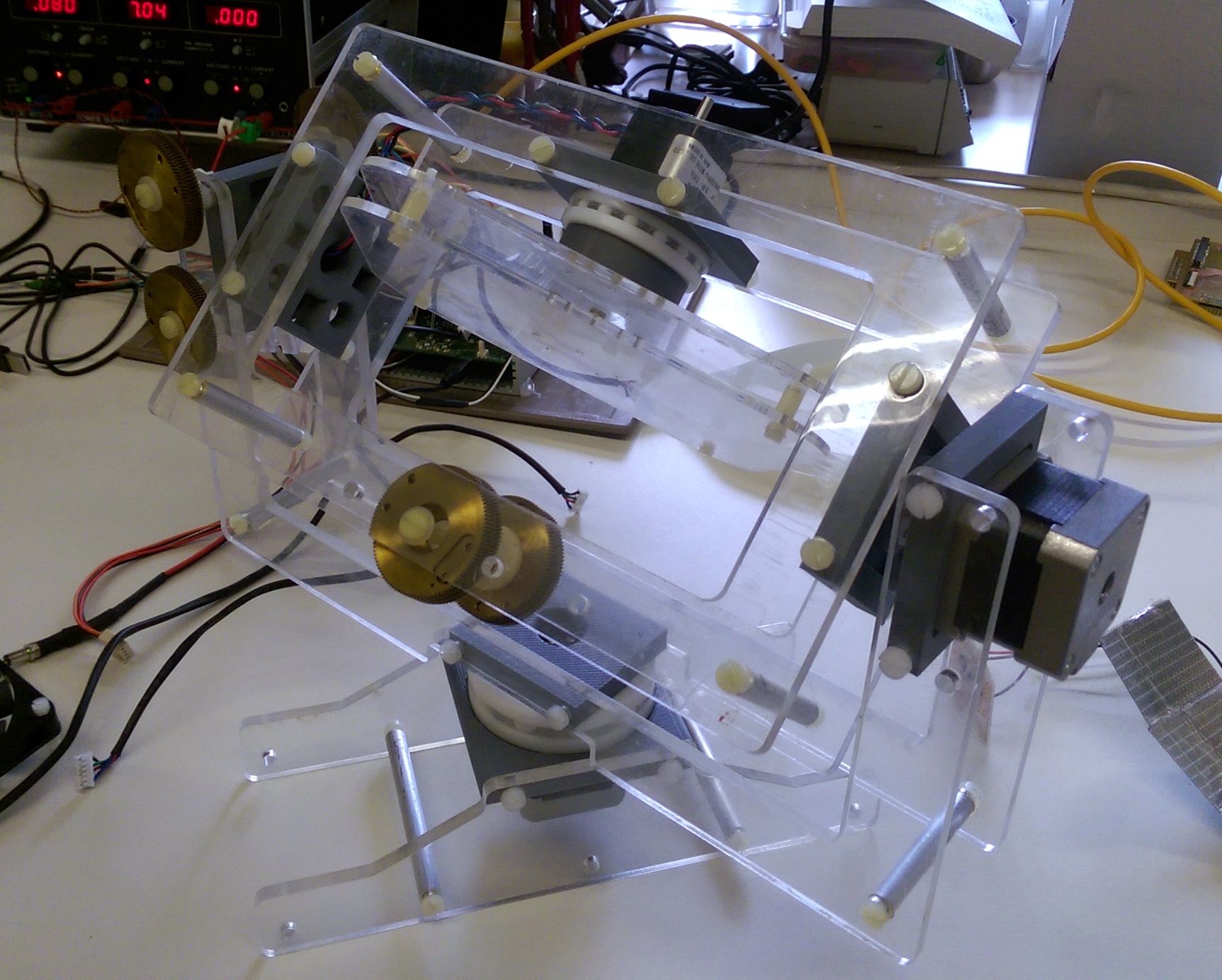
Fig. 2
The main issue, of course, is calibration. Given the sensitive nature of these sensors, each one must be calibrated precisely out of the box and in the case of temperature or climate changes. The current available process is tedious and time consuming. By hand, researchers must position each IMU at many known orientations and compare it with what the sensor is reading. They then must place the IMU on a turn table and spin it at known speeds, once again comparing this to what the sensor is reading. All together, this process not only takes time, but also leaves much room for human error. Thus, my device automates this process, increasing precision and decreasing time.

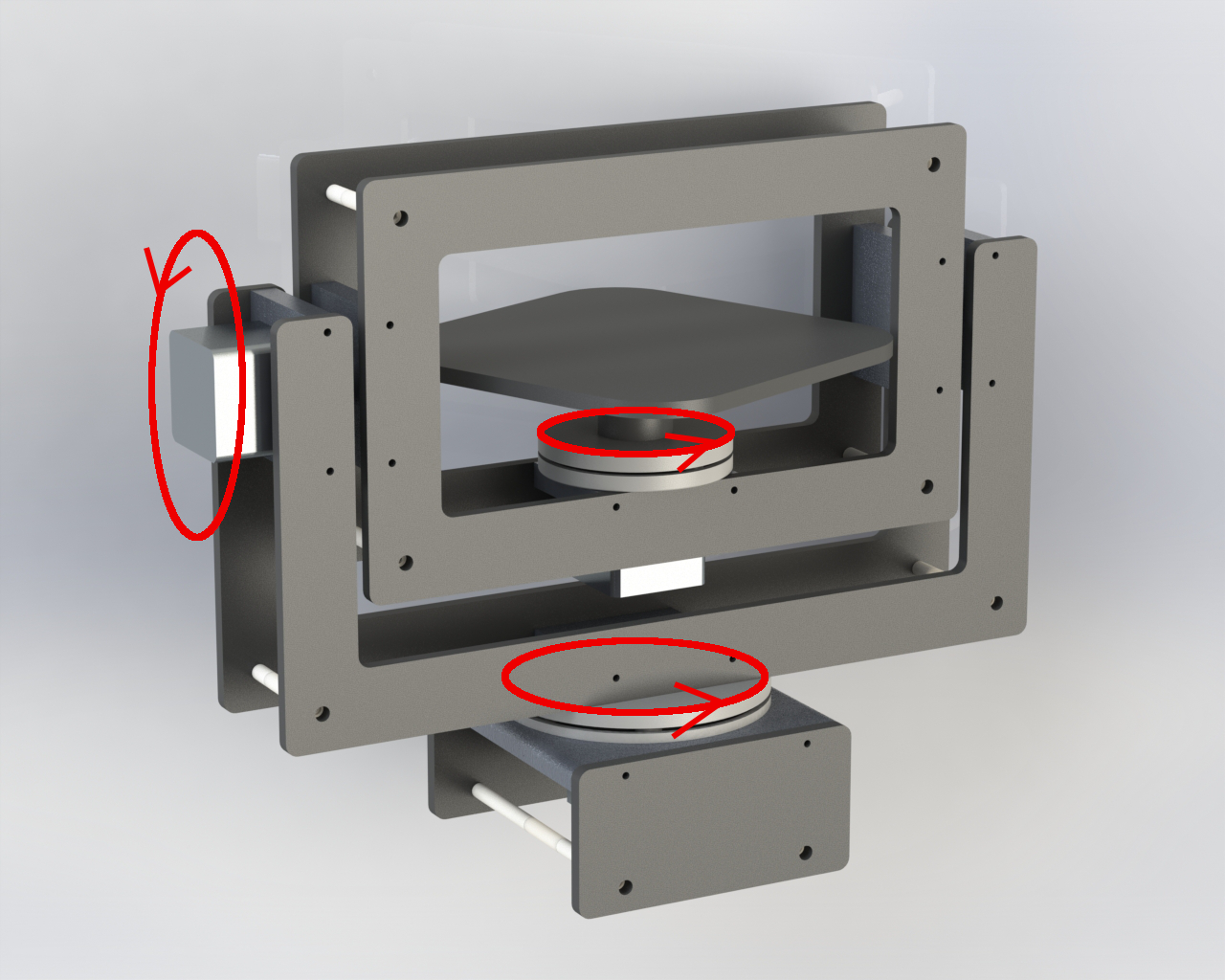
Fig. 3
Inspired by a gyroscope frame, my device uses precise stepper motors and a nested frames to allow the IMU to be positioned in an infinite number of orientations (calibrating the magnetometer and accelerometer). The frames can also take turns spinning at constant speeds (calibrating the gyroscope). Furthermore, every part besides the motors are made out of non-magnetic materials in order to avoid miscalibration of the magnetometer. The motors are then shielded with Gyron, a material that shields against a broad frequency range of magnetic fields.